Automated planning and coordination of autonomous haulers in underground mines
fullscale
Örebro Universitet
2020-03-01
Epiroc, Newcrest Mining
Federico Pecora
2023-04-30
201804622
Purpose and goal
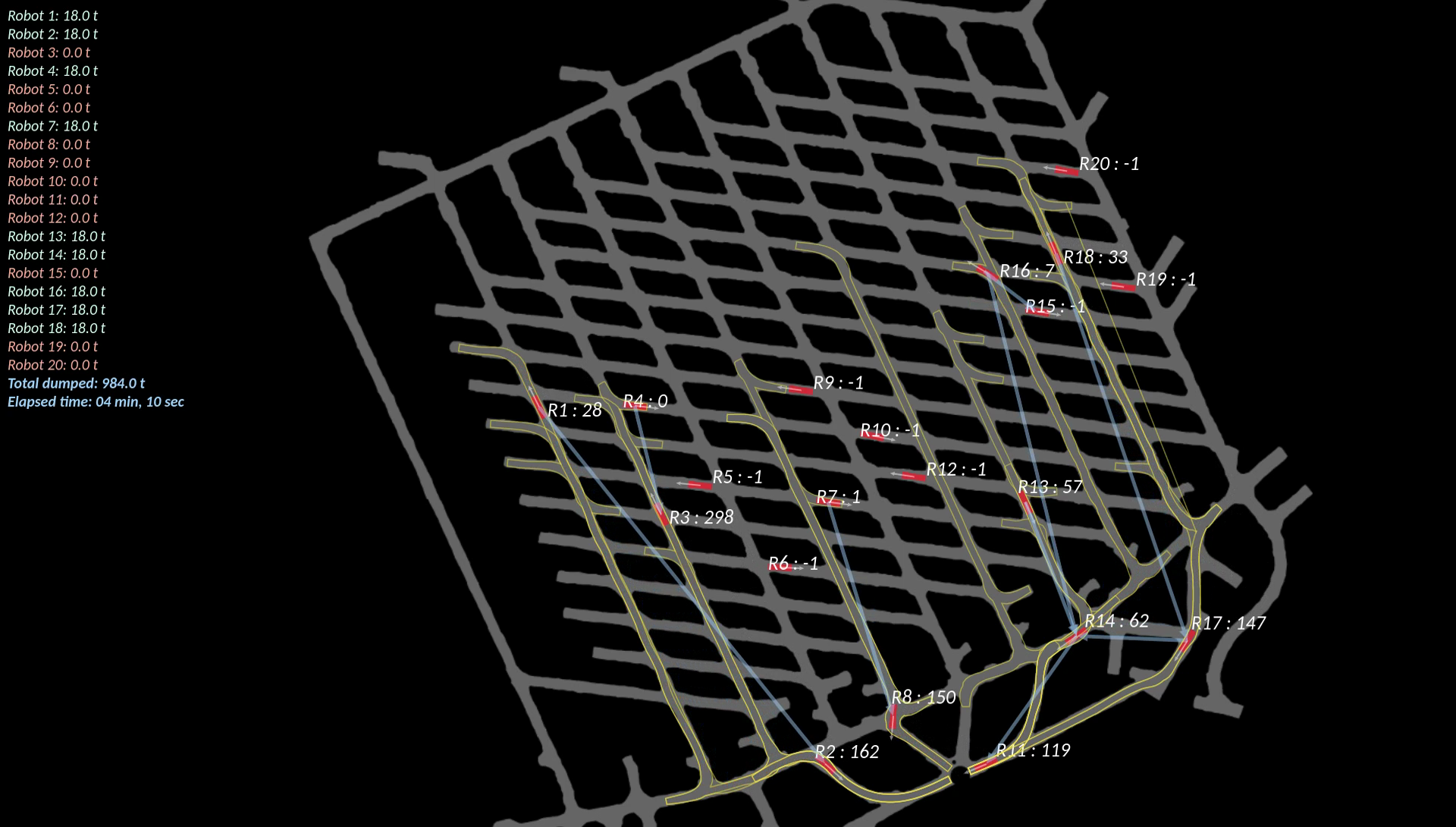
Most operations in underground mining deal with transporting rock through tunnels. This is achieved with Load-Haul-Dump vehicles (LHDs), large machines equipped with a high-capacity bucket that can transport several tons of rock. Today, LHD operations are planned manually, and LHDs are driven by human drivers. This project aims to develop Artificial Intelligence (AI) tools for automating the planning and coordination of fleets of LHDs. These will support two key aspects of fleet management: (1) LHD mission planning, execution and monitoring; and (2) system design and deployment.
Expected results and effects
The project will develop prototypes that can be used to develop a product, aiming at achieving TRL 7 by the end of the project. The results will directly and measurably contribute to several long-term goals of the SIP-STRIM agenda, namely, achieving improved mining methods and processes, more continuous processes, fewer man-hours per produced tonne, fully remote-controlled mining operations, and robust and reliable mining equipment.
Planned approach and implementation
The mission planning, execution and monitoring tools (1) will be based on an existing library for multi-robot coordination, motion planning and control developed at Örebro University. The library will be extended to guarantee the absence of deadlocks. A bespoke optimization process for computing efficient mission allocations will also be developed and integrated. The system design and deployment tool (2) will be built upon a 2D simulation engine developed at Örebro University.
More information
Presentation from Swedish Mining Innovation Program day 2020